Structural Analysis
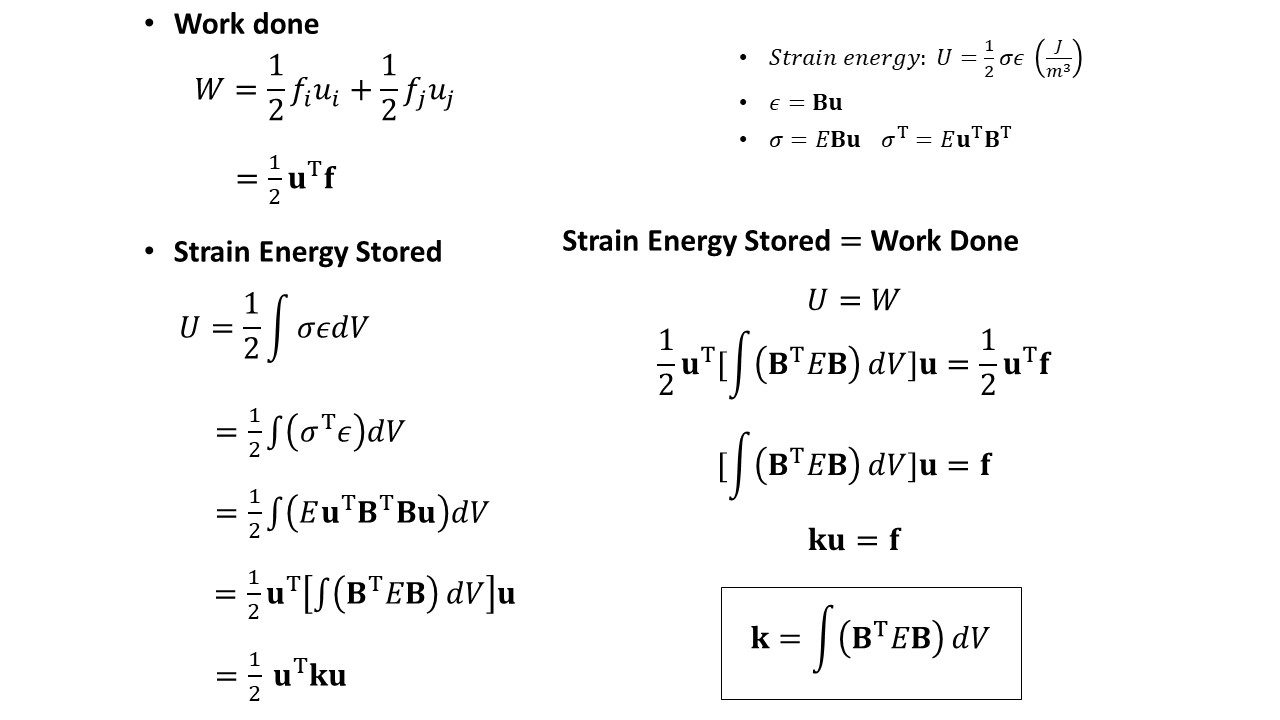
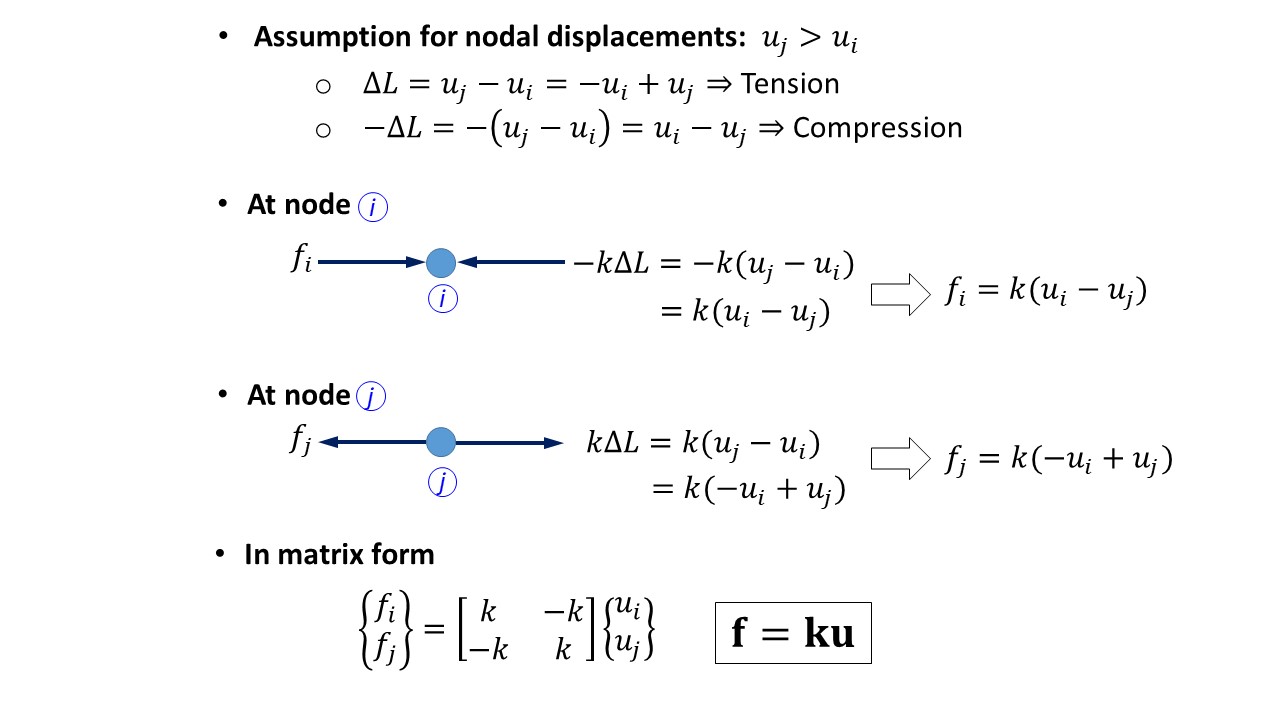
In structural analysis, FEM is used to compute displacement, strain and stresses in the structure subject to external loads. A structural problem can categories based on structural geometry, material properties used and involvement of time.- 1D, 2D & 3D
Based on the geometry, there can be 1D, 2D and 3D structural analysis problems. All structures are three dimensional in real world. However, we model them as 1D if its 1 dimension is relatively larger than other two dimension. For example, bar or truss structures are often modelled as 1D structures. Similarly, the plates and shell structures subjected to plane stress and plane strain conditions can be conveniently model as 2D structures. When, all three dimensions of a structure are comparable to each other, then, we model them as 3D structures. Also, we investigates the complex 3D stress or strain state in a structure model by modelling it as 3D structural problem. The computational cost increases from 1D to 3D structural analysis.
- Linear vs Nonlinear
Based on the material properties used, a structural analysis can be considered as linear or nonlinear one. If the material properties are within the proportional limit, it will be considered as a linear structural problem or nonlinear otherwise. Generally, we design our structure to withstand loads below its yield strength. In other words, such structures are designed to operate within the proportional limit of the materials, consequently, requiring linear structural analysis.
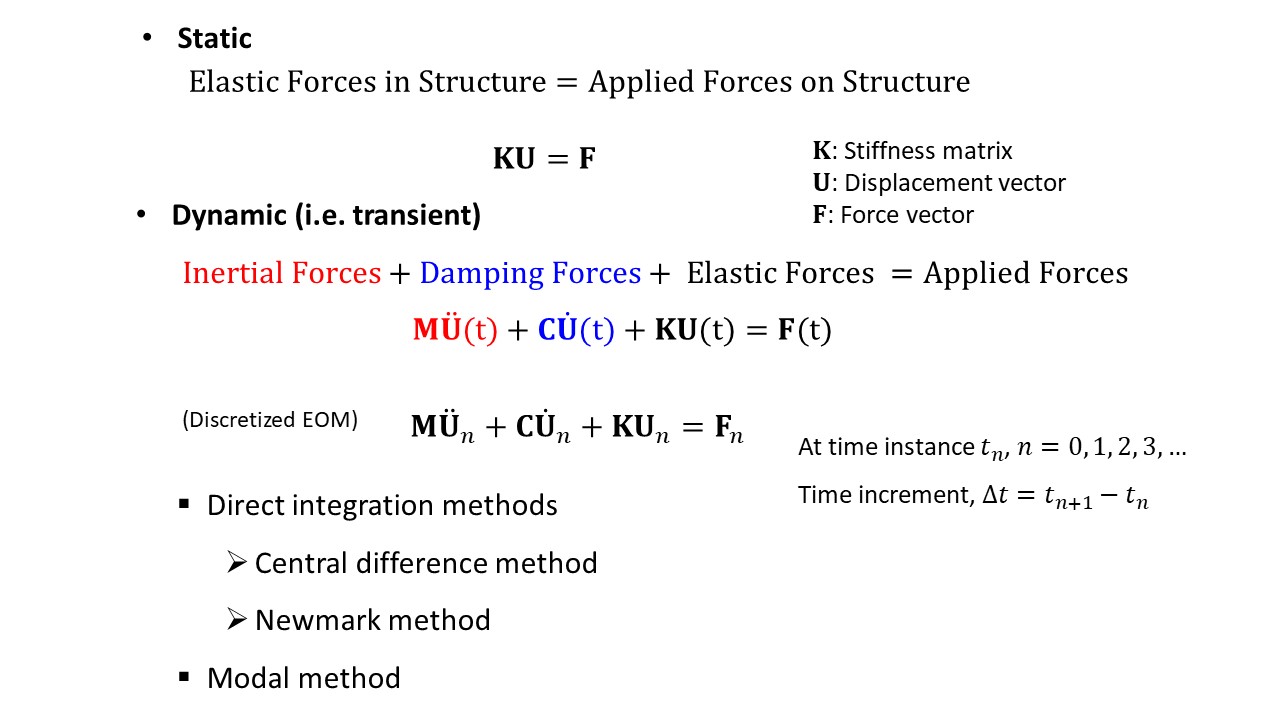
- Static vs Dynamic
A structural problem can be static if the state variables do not change with time, otherwise, it will be a dynamic problem. For static structure problems, only spatial discretization of the domain is required, however, for solving the dynamic problems, there is need of both spatial and temporal discretization. The temporal (time) discretization is needed to evaluate how the response of structure evolves over the passage of time. The dynamic problems are frequently solved using direct integration methods e.g. central difference method, Newmark method etc. Another method for solving linear dynamic problems is the modal method. It should be noted that the dynamic problems involves the terms of inertial force, damping force, elastic force and applied force. In case of static problems, the inertial and damping force terms become zero, thus, the static problems becomes a special case of dynamic problems that involve elastic force and applied force terms only.
For dynamic problems, the global stiffness matrix is obtained by combining the element stiffness matrices. In a similar fashion, the global mass matrix is built from the element mass matrices. However, the construction of global damping matrix is done differently. Rather than building it, we often express the global damping matrix in terms of global stiffness matrix and global mass matrix. This is one way of driving the global damping matrix, and it is named ‘proportional damping model’. It is frequently used because it is convenient as compared to other damping models (i.e. viscous damping model etc.).

Here is an example of how to drive the global mass matrix from the element mass matrix shown below. Similarly, how to express the global damping matrix in terms of global stiffness matrix and global mass matrix and how to find out the relevant constants from the vibration graph representing the relationship between the excitation frequency and the damping ratio of the structure.

Modal Analysis
This analysis is carried out to compute the natural frequencies and the mode shapes of the structure, which plays very important role to design the structures. If the frequency of an external source becomes close or equal the natural frequency of a structure, then, resonance can occur. The resonance phenomenon causes high amplitude vibration that may lead to catastrophic failure.
The modal analysis can be performed by setting assumptions (i.e. free vibration and zero damping) on the equation of motion. Free vibration means that we want computed the natural frequencies of structure by neglecting the excited force term. The damping term is set zero to conveniently solve the problem using the special mathematics technique i.e. Eigenvalue problem. It should be noted the damping force just reduces the amplitude of vibration and effects on the structure frequency can be neglected.

Thermal Analysis
It is used to compute the heat transfer problems. Heat transfer can be through conduction, convection and/or radiation. The thermal problems are solved in a similar fashion as that of the structure problems. For example, for 1D heat conduction problem can be expressed by Fourier equations, which then can be solved using FEM by building a set of simultaneous algebraic equations expressed in matrix form as shown below. The thermal problems can be of steady-state or dynamic nature. For steady-state problems, only spatial discretization is needed, however, for dynamic problems, both spatial as well as temporal discretization is carried out.

Coupled Problem Analysis
All physical problems are coupled in nature. We often decoupled or simplify those using appropriate assumptions so that we can conveniently solve them. However, when and where required, the FEM can also be applied to solve coupled problems. Coupled problems are generally complicated and require relative more computational resource. For example, coupled structural-thermal analysis is often carried to analyze the structures subjected to mechanical as well as temperature loads. For this kind of coupled problem requires both mechanical and thermal properties of the structure materials as inputs. Similarly, the FEM can also be deployed to solve fluid-structure interaction (FSI) problems. Investigation of the interaction between the structural dynamics and fluid mechanics at the interface is not only intricate to solve but also consumes a lot of computation resource.
The coupled problem, in nutshell, require multidisciplinary knowledge and their solution can be challenging due to the presence of strong nonlinearity.